医工学科
マイクロフォーカスX線CTシステム

X線CTは、物体の周りにX線を照射させ、得られたデータをコンピュータで計算することによって、物体の内部構造を観察・検査することができる装置です。
本装置は、0.4マイクロメートル焦点マイクロフォーカスX線管を採用しており、超微細な内部構造の観察が可能です。これを用いて、骨の微細構造の観察や先進複合材料の微小欠陥の観察などを行っています。
多自由度を有する指型ロボット

ヒトの指(拇指、示指など)を模した指型ロボットです。人間の指のように巧みな動きや作業を行うことができます。ロボットの先端には6自由度の力を検出できる力覚センサが取り付けられており、力制御も可能です。
パラレルリンク構造を有するパプティックデバイスとアーム型ロボット

人間とロボットの協調作業に用いるパラレルリンク構造を有するパプティックデバイスです。人間の動きを検出し、また、人間にロボットの動きを提示することができます。これらの働きにより、円滑な協調作業を行うことが可能となります。
多自由度を有するアーム型ロボット(垂直多関節型汎用ロボット PA-10)

人間との協調作業や、食事支援ロボットのプロトタイプとして利用しています。このロボットには7個の回転関節があり、ヒトの腕の自由度とほぼ同じ構造を持っています。よって、人間と共に重量物を運んだり、組立などの作業を行ったりすることが可能です。また、食事の支援作業などの検証にも利用できます。
力覚・感覚提示を行うパプティックデバイス(パラレルグローブ)

ロボットの遠隔操作を行う際、人間の手首に装着することでロボットが受ける力などを提示し、マスタースレーブシステムの一部として利用しています。ロボットの操作者である人間に対し、力覚や触覚などの感覚を提示することによって、より円滑な操作を行うことができます。
分散協調型歩行支援ロボット
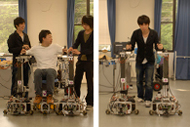
3台の独立したロボットで構成され、それぞれのロボットは個別に利用できます。また、複数台のロボットを組み合わせることで、車イス型、杖型など、歩行支援形態を変えることも可能です。これによって、使用者の望む形態に逐次対応できます。
三次元位置計測装置 OPTOTRAK

三次元位置を高精度・広範囲・高速に計測できるシステム。モーションキャプチャとしても利用可能です。また、複数台のシステムを同時に使用することで、広範囲の計測を行うことができます。医工学科では、ロボットの運動計測や人間の動きの計測などに利用しています。
光トポグラフィ

光トポグラフィは、頭皮上からの多チャンネル反射光計測で脳の血流を測定し、その活動を画像化して観測します。そうすることで、人間の行動や判断に対して脳がどのように反応しているのかを見ることができます。これまでの同様な機器に比べて取り扱いやすいので、さまざまな計測や幼児への対応も可能です。生命医科学部では、種々の機器を利用した時の脳の反応を調査したり、人間の修練度によって脳の反応がどのように違うのかを計測したりするために利用しています。